Google、ストリートビューのパノラマ画像の切れ目を補正する技術のアイディアを公開
9日、米GoogleはGoogleストリートビューのパノラマ画像のつなぎ目を補正する新しいアルゴリズムのアイディアをGoogle Research Blogで公開した。
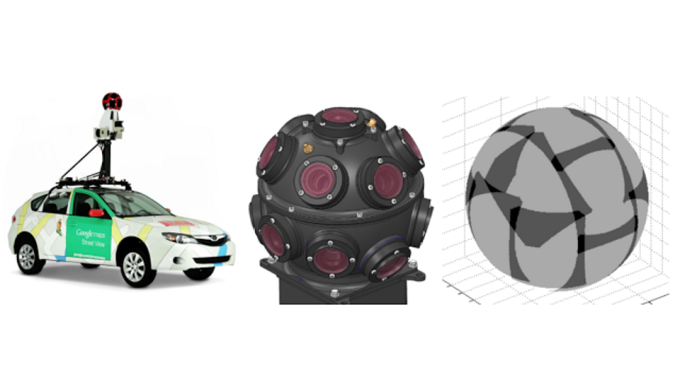
Googleストリートビューのパノラマ画像は15台のカメラで構成された天球型の機材で撮影されているが、各画像間の補正で継ぎ目が発生して不自然になる問題があった。
そのため、Googleは2つの画像間で各画素の動きを表すベクトルであるオプティカルフローを用いた新しいアルゴリズムを開発し、異なるカメラで写した画像コンテンツの重なる領域を整列させることで課題を解決した。

アルゴリズムの計算を簡略化するために、オプティカルフローを計算して各画像の対応する画素を見つけた後にグローバルオプティマイゼーションによって画素を整列させる仕組みだ。また、合成箇所の整列によって逆に合成箇所以外の画像がずれてしまうことを防ぐためにGoogleが開発したオープンソースのC++ライブラリ「Ceres Solver」による非線形最適化を使用している。

そのほか、ブログの記事ではロンドンのタワーブリッジやリオデジャネイロの巨大キリスト像、シアトルで走るSUVなどのパノラマ画像の修正例が掲載されている。



ちなみに、このアルゴリズムは既にGoogleストリートビューのパノラマ画像の継ぎ目を修正するために使われているとのことだ。
(TEXT by ぱソんこ)
●関連リンク
・Seamless Google Street View Panoramas(Google Research Blog)
・Google Research Blog
・Ceres Solver