
Diver-Xは6月23日、グローブ型VRコントローラの新モデル「ContactGlove3」と、ロボティクス向けデータグローブ「ContactGlove3 Pro」を発表しました。ContactGlove3は同日より公式ストアで予約販売を開始しており、価格は9万9800円から。ContactGlove3 Proは49万8000円からで、いずれも2026年10月に出荷・販売開始を予定しています。
あわせて同社は、2026年7月1日付で社名を「Melt Interface Technologies株式会社」に変更すると発表しました。事業もXR・ロボティクス領域のインターフェース「Contact®」、汎用インターフェース「Melt Interface」、B2B受託開発「Solutions」の3領域に再編します。
「VRデバイスの会社」からインターフェース企業へ
Diver-Xはこれまで、グローブ型VRコントローラ「ContactGlove」シリーズを中心にXR向け入力デバイスを展開してきました。

同社は創業初期に寝ながら使うVRゴーグル「HalfDive」の開発を発表しましたが、「寝ながらどう快適に操作するか」という課題が残り、製品の方向性の大幅な変更が発生したことからKickstarterを中止したという経緯があります。この経験から、デバイス単体よりも人とデジタル空間をつなぐインターフェースの重要性に着目し、ContactGloveシリーズの開発につながったと代表取締役CEO 迫田大翔氏は説明しました。

そういった経験から、「人とテクノロジーの境界を溶かし、操作を意識させないインターフェースをつくる」ことを目的とした社名=Melt Interface Technologiesとしたそうです。
EMF方式で指先トラッキングを刷新
ContactGlove3の最大の変更点は、指のトラッキング方式です。従来モデル「ContactGlove2」が採用していた曲げセンサ方式を廃止し、EMF(電磁場)トラッキング方式を新たに採用しました。指先や関節の3次元位置を絶対座標で取得する方式で、推奨環境下におけるセンサー位置誤差は中央値0.5mm、最大値1.5mm(同社計測)としています。
この精度により、指先同士を正確に合わせる、指を組む、指をクロスさせるといった従来のハンドトラッキングでは再現しにくかった動作も正確に捉えられます。楽器演奏や手話、DJプレイなど、指先位置の精度が意味を持つ動作への対応も想定しています。

カメラ式との大きな違いはオクルージョン耐性です。光学式では死角になりやすい状況でも、EMF方式は視界に依存しないため動作を安定して取得できるメリットがあります。
キャリブレーションも改善しました。従来モデルでは毎回の起動前にキャリブレーションが必要でしたが、ContactGlove3では初回のみ。長時間使用時のセンサードリフトも抑えられており、手の位置や指先姿勢が徐々にずれていく問題を解消しました。
対応はSteamVR対応ヘッドセット全般。VRChat、Resonite、そのほかのSteamVRアプリで利用できるとのことです。
新型モジュール「Magnetra3」で掴む操作を安定化
ContactGlove3には、新型コントローラモジュール「Magnetra3」が同梱されます。従来モデルからボタンレイアウトと固定方法を改良したほか、新たにグリップ固定ボタンを搭載しました。
従来のグリップ操作はジェスチャー判定が中心で、手の形が少し変わると掴んだ物が意図せず離れることがありました。グリップ固定ボタンを押すことで、手の形に関わらずグリップ状態を維持でき、物を掴む・持ち続ける・投げるといった操作が安定します。
本体サイズは従来比20%と小型化。グローブ装着時の指との干渉が低減しました。通信面ではケーブル付きの専用ドングルを新たに用意。PCのUSBポートに直挿し型だった従来のドングルと異なり、通信が安定しやすい場所に設置できるメリットがあります。
装着性とメンテナンス性が向上したグローブ部
グローブの布部分はフィット感と耐久性を見直し、生地と固定構造を再設計。指先の第一関節が露出するオープンフィンガー構造は引き続き採用しており、装着したままキーボード操作も可能です。親指には専用の指先キャップを装着することで、可動範囲の広い親指の細かな動きまでトラッキング可能となりました。
ロボット遠隔操作・模倣学習向けの「ContactGlove3 Pro」
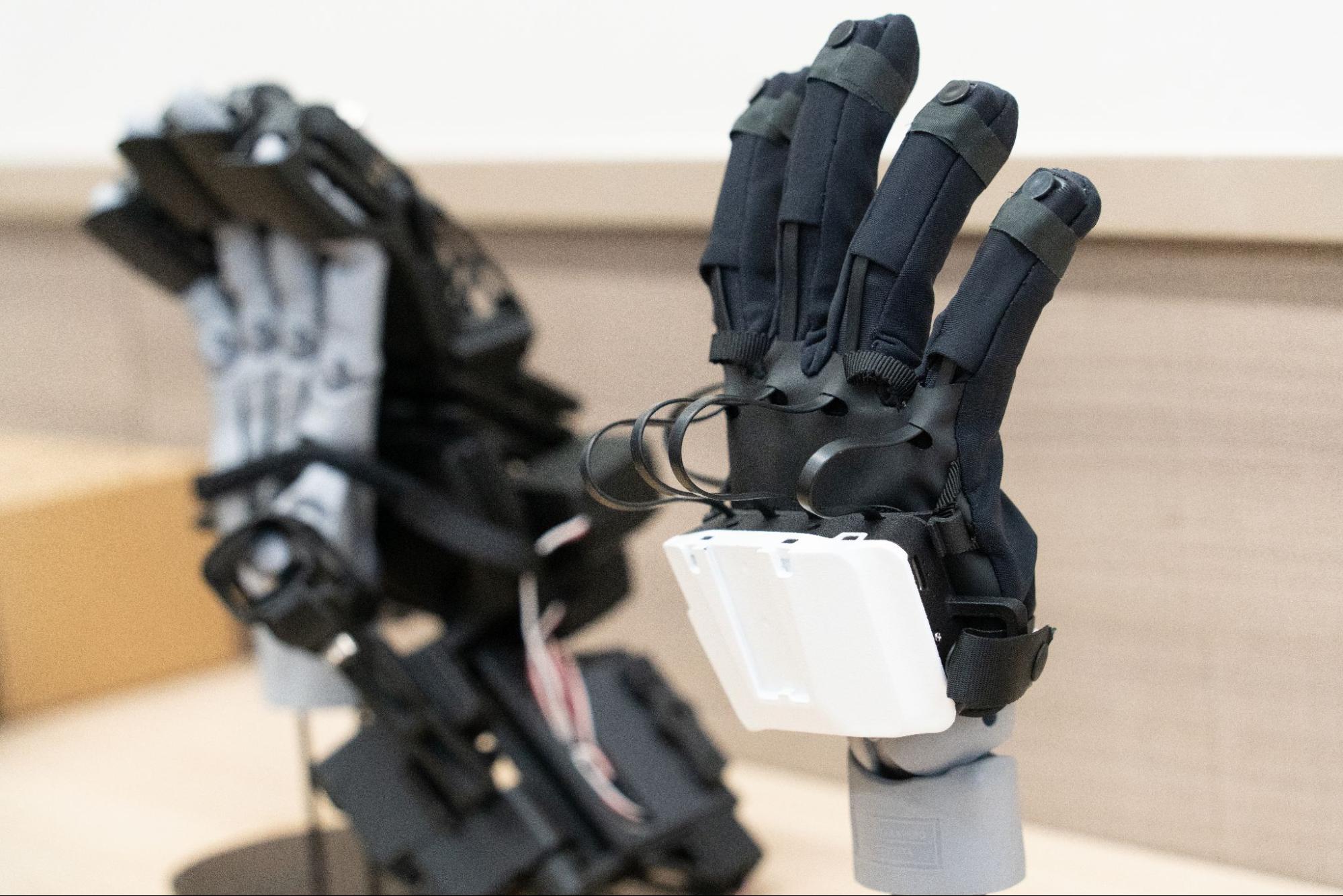
同時発表のContactGlove3 Proは、ロボット遠隔操作、作業データ収集、模倣学習といった研究開発用途を対象とした製品です。EMFトラッキングの精度はContactGlove3と同等ですが、5本すべての指先を覆うフルフィンガー構造を採用し、各指先部に計測コイルを内蔵。指同士が触れ合う、摘む、組み合わせるといった細かなインタラクションまで記録できます。
対応SDKはC++とPython。ROS 2、Unity、Unreal Engine、MotionBuilderに対応し、OSはLinux、macOS、Windowsをサポート。

発表会では、ContactGlove3+トラッカーを使って5本指ロボットハンドをリアルタイムで操作するデモも披露しました。人間の手の動きをロボットにコピーする技術は、VR空間でアバターの手を動かす技術と共通する部分が多く、同社はXRとロボティクスを「人間の動作センシング」という軸でつなぐ方向に事業を広げていきます。
トヨタ紡織が車内検証・工場DXでの活用事例を紹介
発表会には、同社株主でもあるトヨタ紡織の担当者が登壇しました。トヨタグループの一員として自動車内装品を手掛ける同社は、VRゴーグルと組み合わせたハプティクスグローブを、車内空間の検証に活用している。視覚情報だけでは把握しにくい距離感や操作感を、グローブを使って実際に「触れる」形で確認できます。
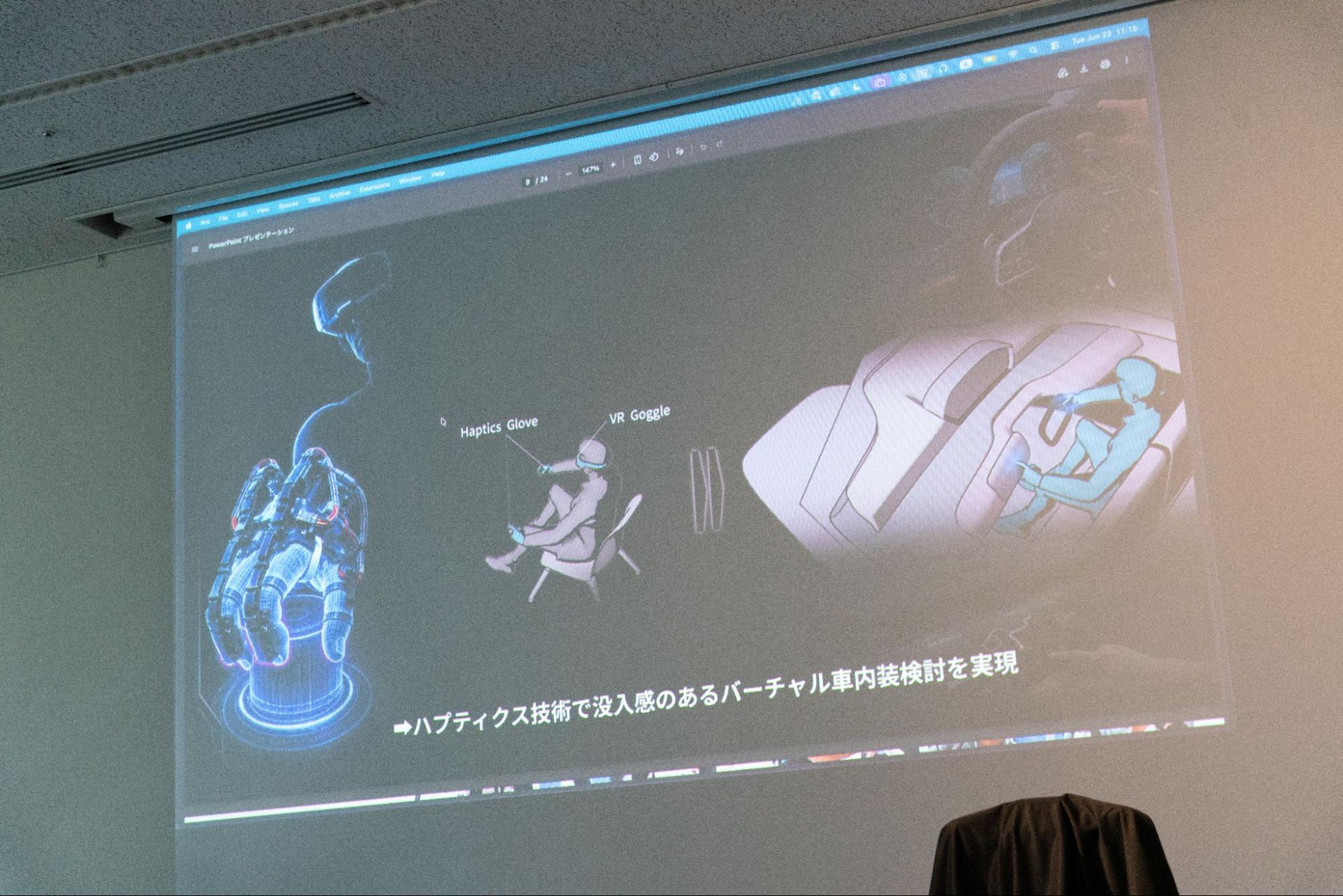
今後は工場DXへの応用も検討しています。自動車シートの表皮を縫い合わせる作業や、回しながら複雑な手順で取り付ける部品の組み付けなど、人間の手作業に依存する工程のデータ化に、ContactGlove3 Proのような高精度グローブが活用できる可能性があるとしました。
(TEXT by 武者良太)
●関連リンク
・Diver-X
・Diver-X Store